
以下文章来源于农业工程学报,作者李荣轩等
《农业工程学报》2025年第41卷第24期刊载了石河子大学等单位李荣轩、龚立娇、李玉洁、陈学庚、王雯烁与李凡的论文——“异类型多机自主智能协同收获作业任务规划方法与试验”。该研究由新一代人工智能国家科技重大专项(项目号:2022ZD0115803)资助。
引文信息:李荣轩,龚立娇,李玉洁,等. 异类型多机自主智能协同收获作业任务规划方法与试验[J]. 农业工程学报,2025,41(24):33-42.
DOI:10.11975/j.issn.1002-6819.202506141
研究目的与方法:
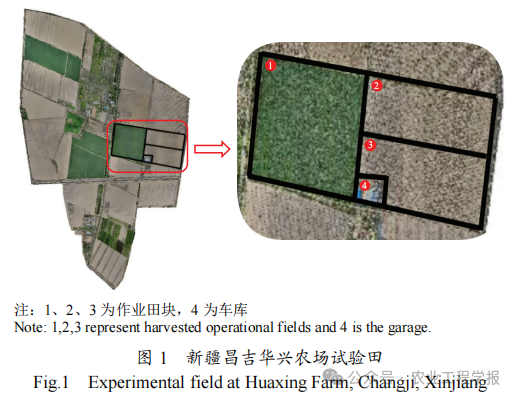
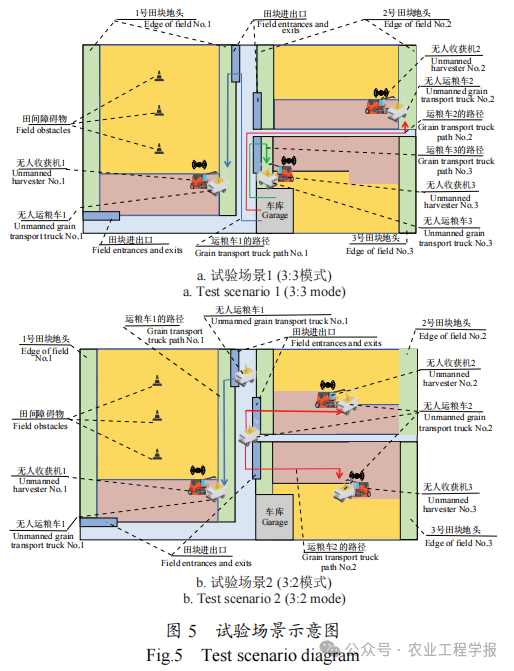
针对多台无人化自主智能收获机和运粮车在大规模农场环境下协同作业过程中存在作业任务规划不科学、资源配置不合理等问题,该研究以多地块下异类型多农机为研究对象,建立多机自主智能协同作业模型,设计混沌自适应非线性粒子群算法优化的多机自主智能协同收获作业任务规划方法,以减少作业总时间和农机总油耗为优化目标,提高协同收获作业的效率。
结果与结论:
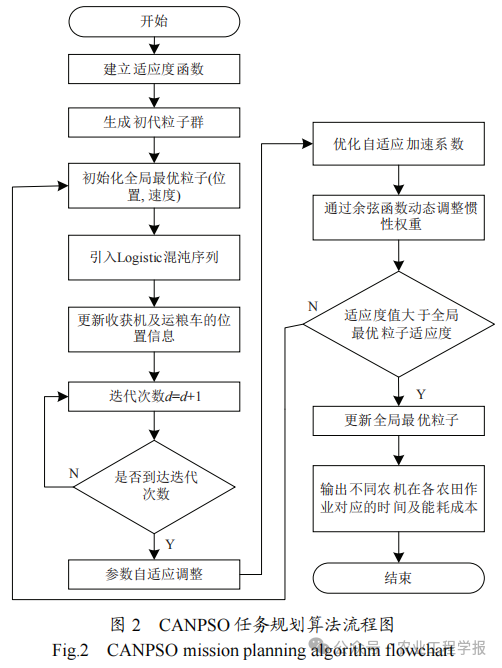
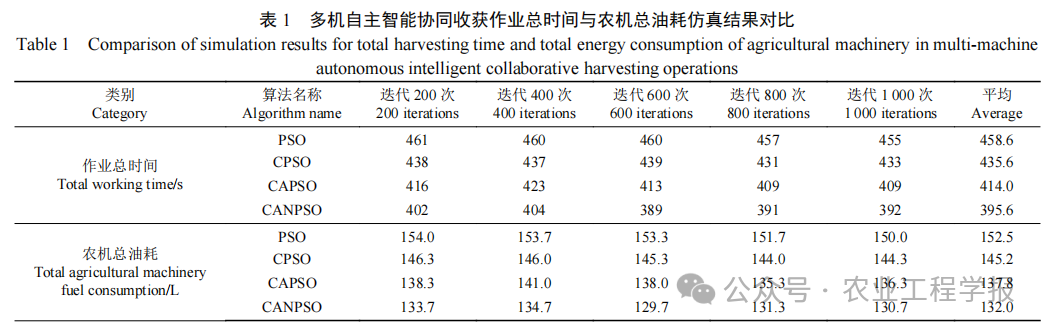
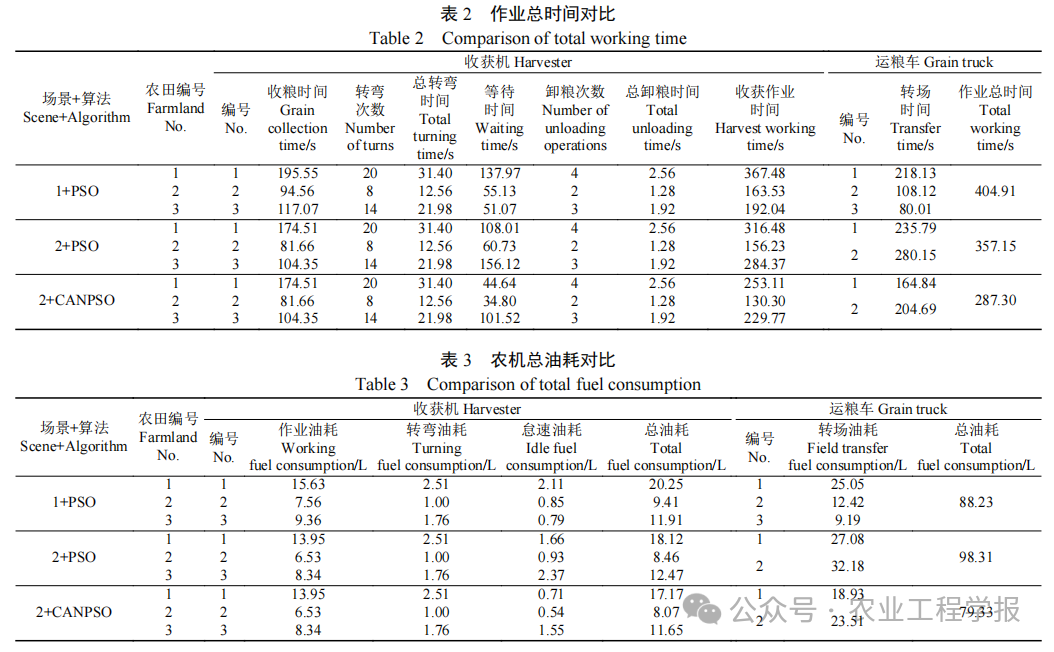
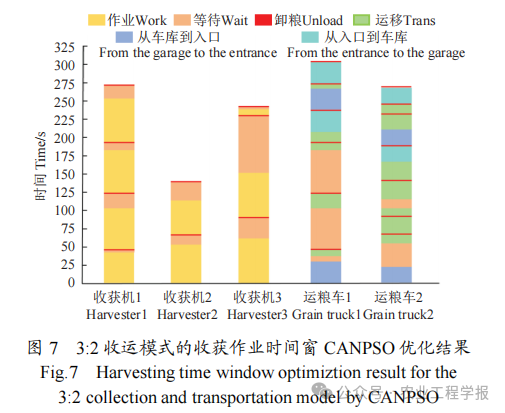
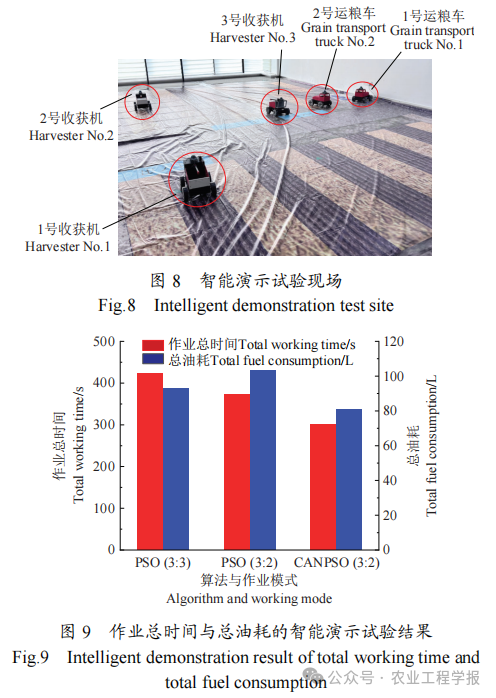
智能演示农机现场试验结果表明:相比于传统的单地块分配单台收获机和单台运粮车的收运模式,异类型多机自主智能协同小麦收获作业任务规划方法实现了多地块3台小麦收获机和2台运粮车的自主智能协同作业,作业总时间减少了29.05%,农机总油耗减少了13.16%,同时减少了运输资源浪费;相比于传统粒子群算法优化的多机自主智能协同收获作业任务规划方法,混沌自适应非线性粒子群算法优化的多机自主智能协同收获作业任务规划方法有效减少了小麦收获环节的作业总时间和农机总油耗,作业总时间减少了19.56%,农机总油耗减少了21.50%。
该方法可实现多地块多台异类型农机的自主智能协同收获作业,减少了作业总时间和农机总油耗,提高了作业效率,可为智慧农场多机自主协同收获作业任务规划提供参考。


本文由丨《农业工程学报》编辑部丨精编发布

